「图论学习笔记」#5 网络流定义与最大流
定义
一个网络 \(G= (V,E)\) 是一张有向图,对于每条有向边 \((x \rightarrow y)\) 都有一个权值 \(c(x,y)\),称之为这条边的容量。另外,存在特殊节点 \(S\),称为源点;\(T\),称为汇点。
设函数 \(f(x,y)\),其定义域为 \(x,y \in V\),满足
- 容量限制:对于每条边,流经该边的流量不得超过该边的容量,即 \(f(x,y) \le c(x,y)\)
- 斜对称性:每条边的流量与其相反边的流量之和为 0,即 \(f(x,y) = -f(y,x)\)
- 流守恒性:从源点流出的流量等于汇点流入的流量,即 \(\sum_{(u ,x) \in E} f(u,x) = \sum_{(x,v) \in E} f(x,v)\)
那么称 \(f\) 为这个网络的流函数,对于边 \((x \rightarrow y)\),\(f(x,y)\) 称为它的流量,\(c(x,y)-f(x,y)\) 称为它的剩余容量。
整个网络的流量为从源点发出的所有流量之和,即 \(\sum_{(S,x) \in E} f(S,x)\)。
由于流量守恒性质,可以知道除了源点与汇点之外,其他的节点不储存流,「流」只是从源点流出,流经整个网络,最终归于汇点。
最大流
对于一个网络,有很多合法的流函数,但是使得整个网络的流量最大的流函数 \(f\),也就是 \(\sum_{(S,x) \in E} f(S,x)\),这样的流函数 \(f\) 称为该网络的最大流。
Edmonds-Karp 算法
是 Ford-Fulkerson 方法基于 BFS 的一个实现。
如果存在一条从源点 \(S\) 到汇点 \(T\) 的路径,满足每一条边的剩余容量都大于 \(0\),那么称这条路径为一条增广路,注意不同于二分图匹配中的增广路。
如果让更多的流沿着 \(S\) 流到 \(T\),那么就能使网络流量增大,且这个值为路径上最小的剩余容量。Edmonds-Karp 算法的思想是利用 BFS 不断寻找增广路,知道网络中不存在增广路。此时不可能增加网络的流量,那么必然得到了最大流。
具体流程如下
在寻找增广路的过程中,只考虑 \(f(x,y) < c(x,y)\) 的边,用 BFS 找到任意 \(S\) 到 \(T\) 的路径, 计算出路径上最小的剩余容量 \(minf\),同时累加总流量。
如果存在一条边满足 \(f(x,y) > 0\),那么它的反向边有 \(f(y,x) < 0\),此时 \(f(y,x) < c(y,x)\),由于 \(c(x,y) = c(y,x)\),那么反向边也有可能成为增广路的一部分,应该考虑边集 \(E\) 中每条边的反向边。我一开始有一个小问题,网络不是有向图吗?为什么也能用反向边呢?后来想明白了,并不是网络中真的有了反向边,对于 \((x \rightarrow y)\),选择它的反边相当于把通过它的流退了回来,并且能够发现新的增广路。
图解。
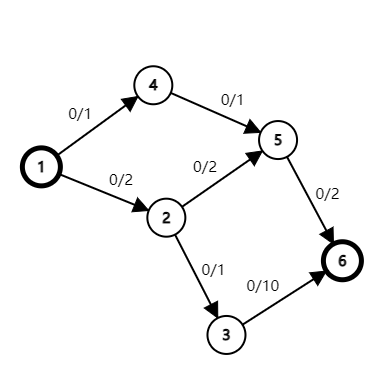
初始状态,钦定 \(1\) 为源点,\(6\) 为汇点。
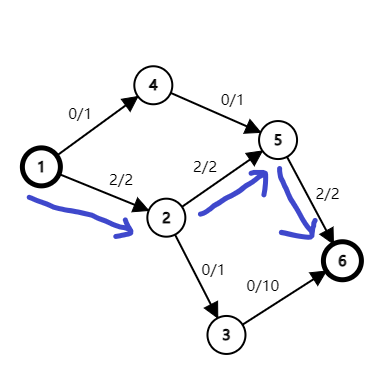
手动 BFS 找到一条增广路 \((1 \rightarrow 2 \rightarrow 5 \rightarrow 6)\),同时发现无法再找到增广路了。将增广路上的边都增加上最小的剩余容量 \(2\)。最大流是 \(2\) 吗?
建立反向边,发现新的增广路 \((1 \rightarrow 4 \rightarrow 5 \rightarrow 2 \rightarrow 3 \rightarrow 6)\),其中只有 \(2\) 走的是原来边的反向边。将路径上走正向边都加上最小剩余容量 \(1\),走反向边的都减去最小剩余容量 \(1\)。可以验证这条增广路是合法的,且最大流又增加了 \(1\)。
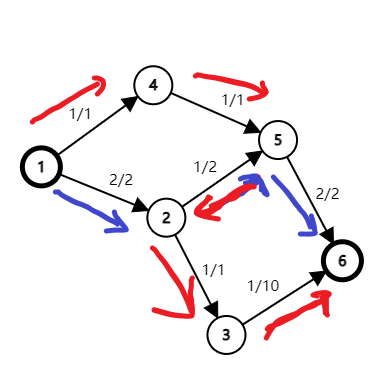
注意画出的红蓝箭头指的是两条增广路,不是网络的真是流向,但是根据增广路可以构造出合法的流向。由于 \((2 \rightarrow 5)\) 减去了 \(1\),但是在 \((2 \rightarrow 3)\) 又加上了 \(1\),所以总流量不变, \((1 \rightarrow 2)\) 的流能通过分流的方式到达汇点。\((1 \rightarrow 2)\) 分流导致原来走的 \((5 \rightarrow 6)\) 也腾出了空间,正好能容纳 \((4 \rightarrow 5)\) 流过来的部分。图中写出来的边权 \(f(x,y)/c(x,y)\) 是正向边的流量。
图中流的路径为 \((1 \rightarrow 4 \rightarrow 5 \rightarrow 6)\),\((1 \rightarrow 2 \rightarrow 5 \rightarrow 6)\) 和 \((1 \rightarrow 2 \rightarrow 3 \rightarrow 6)\),每条流量都为 \(1\)。这样做才能求得最大流 \(3\)。
还有一点,EK 算法遍历的是网络中所有节点和剩余容量大于 \(0\) 的边构成的子图,称为残量网络。代码中的边权都是残量网络的边权,也就是还能容纳多少。对于一条正向边 \((x \rightarrow y)\),容量为 \(z\)。初始还能容纳 \(z\),所以加边add(x,y,z),而其反向边则是add(y,x,0),只有正向边减少才能为反向边腾出空间。
于是乎 EK 算法就没有悬念了,上代码。
复杂度 \(O(nm^2)\),实际远远达不到这个上界,但依然很慢,大概能处理 \(n=10^3 \sim 10^4\) 规模的网络。
#include<bits/stdc++.h>
using namespace std;
#define ll long long
const int inf=0x7fffffff, N=205, M=5005;
int n, m, s, t, pre[N], F[N];
int tot=1, h[N], to[M<<1], nxt[M<<1], w[M<<1];
// 注意tot=1
bool v[N];
ll maxflow;
int read();
// 快读
void add(int x,int y,int z) {
to[++tot]=y, w[tot]=z, nxt[tot]=h[x], h[x]=tot;
}
bool bfs() {
queue<int> q;
memset(v,0,sizeof(v));
// v[i]表示i是否被访问过
v[s]=1, q.push(s);
F[s]=inf;
// 源点为正无穷
while(q.size()) {
int x=q.front(); q.pop();
for(int i=h[x];i;i=nxt[i]) {
int y=to[i], z=w[i];
if(v[y]||!z) continue;
// 被访问过或者剩余容量为0
F[y]=min(F[x],z);
pre[y]=i;
// 记录增广路上的边
v[y]=1, q.push(y);
if(y==t) return 1;
// 到达汇点,找到增广路
}
}
return 0;
// 不存在
}
void update() {
int x=t;
while(x!=s) {
int i=pre[x];
w[i]-=F[t], w[i^1]+=F[t];
// 正向边剩余容量减少,反向边剩余容量增加
x=to[i^1];
// 因为从tot=1开始储存,所以i^1定位到i的反向边
}
maxflow+=F[t];
}
int main() {
n=read(), m=read(), s=read(), t=read();
for(int i=1;i<=m;++i) {
int x=read(), y=read(), z=read();
add(x,y,z), add(y,x,0);
// 反向边权值(剩余容量)最初为0
}
while(bfs()) update();
// 存在增广路就更新
printf("%lld\n",maxflow);
}Dinic 算法
EK 算法每轮可能会遍历整个残量网络,但是最多找出 1 条增广路,效率较低。
设 \(d(x)\) 为起点到 \(x\) 最小的边数,称为层次。在残量网络中,满足 \(d(y) = d(x) +1\) 的边 \((x \rightarrow y)\) 构成的子图称为分层图,这显然是一张 DAG。使用 BFS 很容易实现。
Dinic 算法基于分层图,其流程如下:
- 在残量网络上使用 BFS 求出节点的层次,构造分层图。
- 在分层图上寻找任意一条增广路,进行增广,并将答案加上增广流量。
- 貌似一次 DFS 能够找出所有增广路。
- 如果无法再次建立分层图,当前流量即为最大流。
一个重要的优化是当前弧优化。定义点 \(x\) 的当前弧为 DFS 过程中遍历过的 \(x\) 的最后一条出边。首先如果一条边被增广过了,那么他便不会再次被增广,如果再遍历这些边的话相当浪费时间,所以对于节点 \(x\),每遍历一条边,都让再次访问 \(x\) 时从这条边开始,且不去遍历之前的边。具体实现看代码。
此外,还有一个优化。递归完回溯时,如果返回的是 0,说明已经增广完毕,直接将这个点移出分层图。
效率高于 EK 算法,复杂度为 \(O(n^2m)\),但是很难达到这个上界,能够处理 \(n = 10^4 \sim 10^5\) 规模的网络。用 Dinic 算法求解二分图最大匹配的复杂度为 \(O(m \sqrt n)\),实际表现更快。
#include<bits/stdc++.h>
using namespace std;
#define ll long long
const int inf=0x7fffffff, N=205, M=5005;
int n, m, s, t, hh[N], d[N];
int tot=1, h[N], to[M<<1], nxt[M<<1], w[M<<1];
ll maxflow;
int read();
// 省略快读
void add(int x,int y,int z) {
to[++tot]=y, w[tot]=z, nxt[tot]=h[x], h[x]=tot;
}
bool bfs() {
queue<int> q;
memset(d,0,sizeof(d));
d[s]=1, q.push(s);
while(q.size()) {
int x=q.front(); q.pop();
hh[x]=h[x];
// hh[]要把h[]复制一份
for(int i=h[x];i;i=nxt[i]) {
int y=to[i], z=w[i];
if(d[y]||!z) continue;
q.push(y);
d[y]=d[x]+1;
if(y==t) return 1;
}
}
return 0;
}
int dinic(int x,int flow) {
// flow表示当前增广路的最小剩余容量
if(x==t||!flow) return flow;
// 到达汇点或者增广完毕
int res=flow;
for(int& i=hh[x];i;i=nxt[i]) {
// i是个引用,当前弧优化
// i变为nxt[i]时也直接让h[x]变为nxt[i],最终导致从x出发直接到达它的当前弧
int y=to[i], z=w[i];
if(d[y]!=d[x]+1||!z) continue;
// 不是分层图中节点或者不再残量网络中就不搜索
int k=dinic(y,min(res,z)); // 取最小值
if(!k) d[y]=0;
else w[i]-=k, w[i^1]+=k, res-=k;
// 优化。移出分层图
if(!res) return flow;
// 加这句话快在洛谷的板子 700ms -> 50ms
}
return flow-res;
// 返回的其实就是所有k的和,表示从这个点出发能够增广的值之和
}
int main() {
n=read(), m=read(), s=read(), t=read();
for(int i=1;i<=m;++i) {
int x=read(), y=read(), z=read();
add(x,y,z), add(y,x,0);
}
while(bfs()) maxflow+=dinic(s,inf);
printf("%lld\n",maxflow);
}二分图最大匹配
对于一张 \(n\) 个节点,\(m\) 条边的二分图,可以新增一个源点 \(S\) 和一个汇点 \(T\),从 \(S\) 到每个左部节点连有向边, 从每个右部节点到 \(T\) 连有向边,原本的 \(m\) 条边看作左部节点到右部节点的有向边,形成一张 \(n+2\) 个节点,\(m+n\) 条边的网络。
把网络中每条边的容量都设为 1,该二分图最大匹配数就等于网络的最大流量。求出最大流后,所有存在「流」经过的点和边就是匹配点、匹配边。
如果要求该二分图的多重匹配,只需要把 \(S\) 到左部节点 \(i\) 的有向边容量设置为匹配数量上限 \(kl_i\),右部点到 \(j\) 到 \(T\) 的有向边容量设置为匹配数量上限 \(kr_j\)。
参考:
最大流算法之一——EK算法 by 千杯湖底沙
Dinic 学习笔记 by Menci
最大流 Dinic by 赵悦岑